In February 2010, a middle-aged real estate agent in San Diego pressed the brakes in her 2009 Toyota Camry. The car, instead of slowing, surged forward. A frantic 911 call recorded her final words: “We’re in trouble. There’s no brakes.” She and her family were killed. This tragedy became the public face of the “unintended acceleration” crisis that would engulf Toyota, but its root was not a malevolent spirit in the machine. It was, investigators would later determine, a convergence of mundane flaws: a pedal design susceptible to entrapment by an all-weather floor mat, and an engine control software architecture that prioritized throttle command over a brake-pedal sensor signal. A $15 sensor and a software logic tree had created a multi-billion-dollar corporate crisis and a profound loss of life.
The Toyota crisis is a masterclass in single-point failure within a complex system. Modern vehicles are networks of over 100 million lines of code controlling 150+ electronic control units (ECUs). This digital nervous system is a masterpiece of integration and optimization. Yet, this very integration creates catastrophic vulnerability. When a cheap, non-redundant component—a sensor, a capacitor, a line of code—fails, its effects can propagate uncontrollably through the entire network, bypassing mechanical safeguards. The industry’s drive for efficiency and cost reduction has systematically eliminated the buffers, redundancies, and simple mechanical overrides that once contained failures. We have traded robust, understandable mechanical systems for fragile, opaque digital ones where a flaw in a single microchip can command a two-ton vehicle to its destruction.
This shift represents more than an engineering trend; it is a fundamental change in the nature of automotive risk. The failure is no longer a local breakage—a snapped belt, a burst hose—that leaves the driver in control of a coasting vehicle. It is a systemic, software-defined event that can seize primary controls. The risk is no longer merely statistical; it is systemic and path-dependent, embedded in design choices made a decade before the vehicle reaches the road. To understand modern automotive failure, we must stop looking for the broken part and start analyzing the brittle network.
The Architecture of Fragility#
The Vanishing Mechanical Override#
Historically, automotive safety relied on decoupling and redundancy. The throttle cable was physically separate from the brake hydraulic system. A stuck throttle could be overcome by firm braking, as the brake system had its own independent power source (the vacuum booster or, later, hydraulic pressure). Steering maintained a direct mechanical link between the wheel and the road.
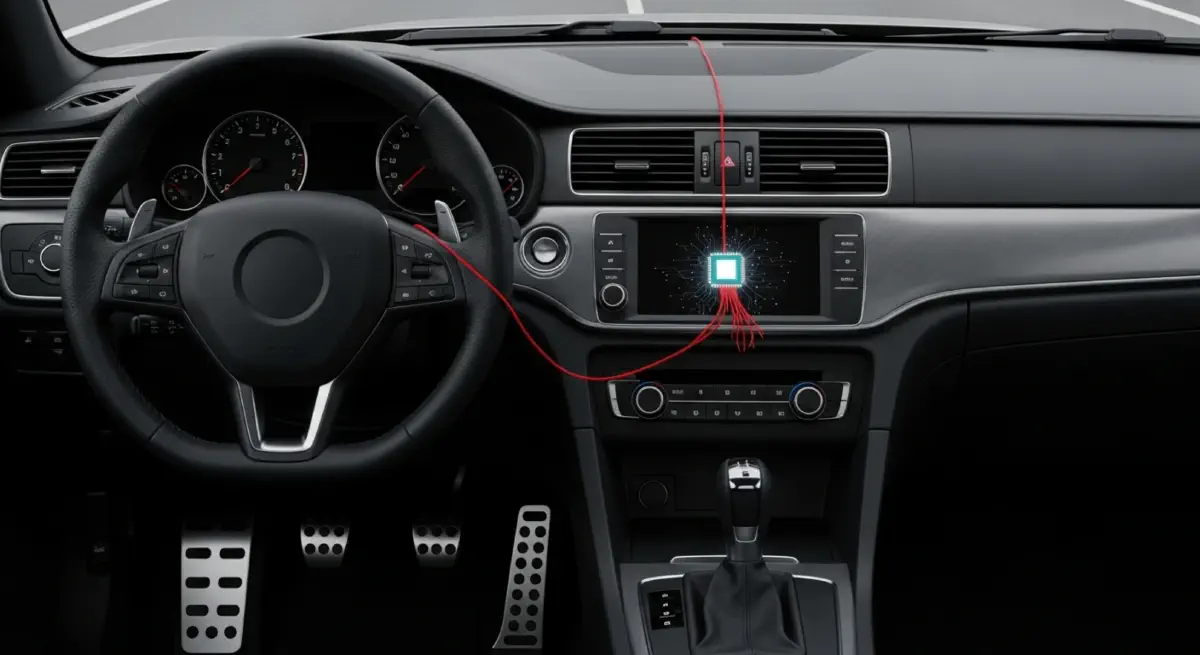
Drive-by-wire and brake-by-wire systems dissolve these boundaries. The accelerator pedal is now a sensor sending a signal to an ECU. The brake pedal is often a “brake request” sensor, with a computer deciding how to apply hydraulic or electro-mechanical brakes. While these systems enable advanced stability control and efficiency, they create a common point of failure: the software and power architecture. If a voltage spike corrupts the main ECU or a software bug misinterprets sensor noise, both throttle and brake response can be compromised simultaneously. The mechanical “fight” between systems is replaced by a digital argument the driver cannot adjudicate.
Toyota’s crisis was exacerbated by its “fail-silent” design philosophy in its engine control module. When it detected an error, it could shut down certain functions. In some scenarios, this meant the system ignored the brake-pedal-position sensor’s “override” signal, a catastrophic software trade-off for a perceived reliability benefit.
The Complexity Catastrophe#
The number of software interactions in a modern vehicle is astronomically greater than the mechanical interactions in a car from the 1990s. Each interaction is a potential failure path. Testing cannot possibly cover every combination of states across all ECUs under all environmental conditions (temperature, voltage, electromagnetic interference). Flaws emerge in the interstitial spaces between subsystems—the places no single engineering team fully owns.
The 2014 General Motors ignition switch scandal exemplifies this. A switch detent spring with insufficient torque could be jarred from “Run” to “Accessory” while driving, disabling power steering, brakes, and airbags. The failure was mechanical, but its systemic consequence was digital: the sudden loss of power triggered a fatal chain reaction in the vehicle’s safety systems. Engineers knew of the switch flaw for a decade but treated it as a local, convenience issue (the car might stall), failing to model its catastrophic systemic effects. The organizational structure—silos between switch engineers and safety engineers—became a failure-amplifying architecture.
The Organizational Amplifiers#
The Optimization Trade-off#
Single-point failures are often the direct result of optimization under cost constraints. A redundant sensor, a thicker wire, a more robust microcontroller, or a simpler, less integrated software architecture all cost money and weight. In an industry where profit per vehicle can be less than $1,000, these margins are meticulously shaved. The calculation is a classic risk trade-off: the statistical probability of a failure multiplied by its cost. When the probability is deemed infinitesimally small (one in ten million), and the cost of redundancy is certain, the ledger favors elimination of the redundancy.
This probabilistic model breaks down when the failure, however improbable, is catastrophic and systemic. It also fails to account for common-cause failures—a single event that takes out multiple “redundant” systems. A voltage surge from a failing alternator can corrupt multiple ECUs at once. A software bug can be replicated across every unit of a model line. The assumption of independent failure rates, core to reliability engineering, is invalidated by integrated digital systems.
The Recall as a Systemic Symptom#
The scale of modern recalls—tens of millions of vehicles—is a symptom of this centralized fragility. A flawed airbag inflator from supplier Takata was installed in vehicles across nearly every major manufacturer, ultimately leading to the largest automotive recall in history (over 67 million inflators in the U.S. alone). A single, optimized, centralized component became a universal fracture point.
The remedy is often a software patch, a digital recall that highlights the new reality. The “fix” is not a stronger part, but a revised algorithm. This transfers the failure mitigation from the physical realm (where a repaired car stays repaired) to the digital realm, where new software can introduce new, unforeseen interactions and failures. The vehicle’s safety is now a continuously updated service, not a fixed property.
The Inescapable Conclusion#
The pursuit of efficiency, feature integration, and cost reduction has engineered a profound vulnerability into the heart of modern automobility. The single-point failure is no longer an anomaly; it is a latent property of the system. The fracture point is often invisible—a line of code, a capacitor’s tolerance, a supplier’s quality control lapse on a sub-$10 component.
This creates a society-scale risk. We have outsourced not only manufacturing but also risk assessment to opaque, global supply chains and algorithmic design processes. The regulatory regime, built for a mechanical age, struggles to audit millions of lines of code for systemic logic flaws. The driver, once the final, mechanical backup in a failure chain, is now often a passenger in their own vehicle when the software fails.
The lesson of the single-point failure is that robustness cannot be an afterthought. It must be architected in, through deliberate redundancy, system decoupling, and organizational structures that map failure consequences across silos. In an interconnected system, there is no such thing as a local flaw. Every component is now critical. The fracture, when it comes, will follow the path of greatest integration and least redundancy. In the modern automobile, that path leads everywhere.